技术巡猎 零跑汽车 一种反向预充控制方法及系统。新能源车上高压这件事,无非就是“电池一接通,车就启动了”,对吗?其实完全不是。真正的工程逻辑里,高压系统上电前,有一个很关键、但平时几乎没人注意的动作,叫“预充“。这一步做得不好,后面那一下就不是启动了,而是实打实的冲击。
为什么要预充呢?因为高压系统里有母线电容。你可以把它理解成一个“还没装满水的大容器”。动力电池那边电压是非常高的,几百伏起步,如果主继电器一闭合,直接把高压硬灌进去,瞬间电流就会很大,对继电器、电容、控制器都是冲击。工程上当然不能这么干,所以行业里常见的办法,是先通过一套专门的预充回路,慢慢把这个“容器”先填起来,等两边电压接近了,再正式把主回路接通。
传统方案怎么做?非常直接。在电池包里放预充继电器和预充电阻,先走这条“小路”,让电容充起来,再闭合主继电器。这个方案是成熟稳妥的,行业里用得很多。但问题也很现实:多一套器件,多一套布置,多一段线束,多一些成本,也多了几个潜在失效点,传统高压预充方案普遍需要额外设置预充继电器和预充电阻,会让电池包硬件结构更复杂。
零跑这份专利想做的,就是把这套东西“挪个思路”。它没有继续老老实实加专用预充支路,而是借用了车上本来就有的双向DCDC。平时大家对DCDC的理解,大多是“把高压电变成低压电”,给12V系统供电,给小电瓶补能。零跑这里换了个方向:在高压系统还没正式接通前,先让蓄电池管理模块给双向DCDC提供低压电,再由双向DCDC把这部分低压电升压到目标高压,去给母线电容做预充。低压侧输入电压范围是9V---16V,预充电流范围是10A---60A。也就是说,它是拿低压电先“点亮前戏”,把高压上电这一步提前铺好。
可以这么理解:以前是专门修一条辅路,让车慢慢并线;现在是直接调用车上已有的电源模块,兼职把这个并线动作完成。用户感知不到差异,但对整车架构来说,味道不一样。因为这已经不是单纯做功能了,而是在考虑怎么复用现有硬件、怎么减少专用器件、怎么把系统做得更紧凑。
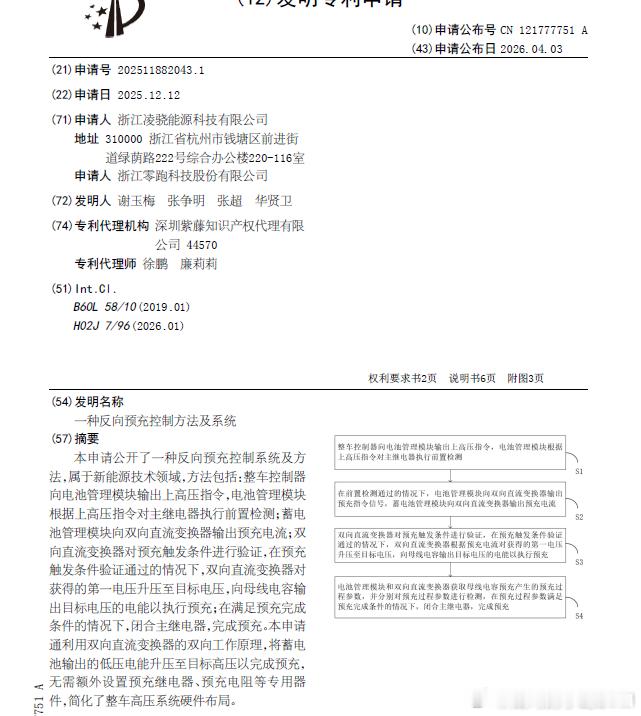
再看它的控制流程,也不是拍脑袋硬来。整车控制器先发上高压指令,BMS先检查主继电器状态,重点之一是主负继电器有没有粘连。继电器如果已经粘连了,说明高压回路可能存在异常导通风险,这时候还谈什么预充啊,流程直接退出。只有前置检测通过,系统才继续往下走。
接着,BMS给双向DCDC发预充指令,双向DCDC自己还要再做一轮判断,有两个条件。一个是目标电压在预设时间内波动不能太大;另一个是低压侧输入要高于门限。文中举了个例子,目标电压可以按电池包实时电压来定,比如800V;然后看它在200ms内的波动幅度是否控制在±5V以内。波动太大,说明目标本身不稳定,这时候贸然升压,容易出现升压不足、过压,甚至电流冲击。
等这些条件都通过了,双向DCDC才开始升压,给母线电容预充。充的过程中,它会持续看故障状态;BMS继续观察主正继电器两端的电压差。等到预充时间没有超时,而且这个电压差已经足够小,系统才会闭合主正继电器,完成真正的高压上电。示例条件是:预充时间不超过6秒,主正继电器两端压差小于15V。
这么做到底有什么实际意义?
最直接的好处,就是做减法。少掉预充继电器、预充电阻这类专用件,意味着高压系统硬件布局可以更简化,电池包结构更收敛,物料成本、封装难度、线束复杂度,都有机会往下走。它的目标就是在完成预充的同时,无需额外设置预充继电器、预充电阻等专用器件,简化整车高压系统硬件布局。
当然,减法从来不是白送的。专用硬件拿掉了,就意味着更多能力要压到双向DCDC和控制策略上。它要能反向工作,要能稳定升压,要能判断输入状态,要能处理故障退出,还要和整车控制器、BMS、蓄电池管理模块配合得非常清楚。省掉的不是难度,省掉的是器件;系统复杂性并没有消失,只是从“硬件堆料”转成了“控制与集成能力”。